YourMark
YourMark is a non-commercial social network platform designed to increase awareness and raise funds fornon-profit organizations with the aim to provide true social good to the most undervalued parts of humanity.
YourMark is a non-commercial social network platform designed to increase awareness and raise funds fornon-profit organizations with the aim to provide true social good to the most undervalued parts of humanity.
Research Project: Use of Monte Carlo search tree and Reinforcement Learning to optimize traffic lights in an urban environment to reduce traffic congestion and avoid spillback situations.
High school project consisting on the development of a robot capable of solving the Rubik's cube.
Implementation of a method inspired by Model Predictive Control to achieve Multi-Agent declonfliction.
In this study, we investigated the performance of contrastive learning for MR-based sCT generation in HN cancer and compared it to the baseline model CycleGAN. We showed that, when trained under the same conditions and on the same data, CUT outperformed both, its variant FastCUT and CycleGAN, serving as a proof-of-concept for the validity of this method.
Initialization: Use of Harris for feature detection and KLT for feature tracking to generate a keypoint matching and use of 3p3 RANSAC for estimating initial pose of cameras Continuous Operation: Use of 3p3 RANSAC to continuously estimate the camera pose of new frames New landmarks addition: Use of Harris and KLT to detect and track new landmarks
Interactive tool that serves as a centralized database of space objects and alerts the user of possible future collisions with debris or other satellites.
Implementation of an iterative inverse kinematics algorithm to calculate net joint velocities in a rigid body linked segment robot.
Developed an interactive tool that operates in a grid world to visualize the evolution of V and Q updates of Policy Iteration, Value Iteration and Q-Learning. The tool allows to tune multiple hyperparameters such as the discount factor, the learning rate, the exploration rate, or the stochasticity of the transition probabilities.
Hackathon Project | Development a framework in Unity that:
1. Visualizes current global trade routes for a specific good and a specific country
2. Optimizes current global trade routes to reduce emissions, risk and finantial cost
Simulation playground of multibody orbital mechanics using ODEs. The tool allows to insert multiple planets in a multibody system and projects the future trajectory of the planets.
Project depicting processes of evolutionary game theory. Simulation of the population evolution of species using stochastic strategies to interact with each other.
Project exploring ANNs that are composed of a soup of fungible neurons (treated as identical unit processing functions) that attend to each other according to their relative position in a high-dimensional space.
Bachelor thesis main tasks: development of a control simulation and a path planning framework of a VTOL long range tailsitter drone for medical delivery.
Visual Simulation of Ant Colony Optimization: A probabilistic technique for solving computational problems which can be reduced to finding good paths through graphs.
Simulation of a 3 body motion using ODE and determination of parameters needed to achieve a lunar insertion orbit from Earth.
Design of a Variational Autoencoder to create a disentagled low dimensionality representation of an image.
Design of a chess interactive tool with the implementation of minimax search to design an agent capable of determining best move accounting for all game states X movements ahead.
Collection of shortest path algorithms (Dijkstra, A*, Bellman-Ford, All pair SP, DFS, BFS, and own) that converge to the most cost-effective air traffic routes by minimizing a cost function composed by fuel consumption, noise generated, obstacles proximity and traffic congestion.
Research Project: Study of neuroevolution to create an AI driven vehicle control framework that achieved 3-layer integration control stability even with the presence of a disturbance random force.
Research Project: Novel path planning method to achieve shortest paths while avoiding collisions and reducing traffic congestion.
Use of raycasting to build a render engine including union, intersection and smoothness filters.
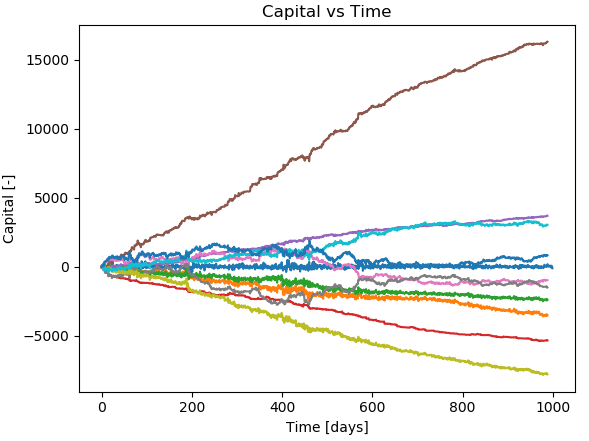
Use of genetic algorithms and neural networks to optimize policies determining investment strategies in the stock market.